miniPSU – zasilacz warsztatowy, cz. 1
Napisano dnia 19.05.2024 r. o godzinie 13:12
Autor: Piotr Sperka
Wstęp
Zasilacze warsztatowe to dosyć oklepany temat, który przerabiał prawdopodobnie każdy elektronik-hobbysta. W Internecie jest wiele sprawdzonych konstrukcji. Sam od kilkunastu lat korzystam z popularnej konstrukcji z Electronics-Lab.com.
Pomimo, że urządzenie działa całkiem przyzwoicie jak na moje potrzeby, to ma jedną zasadniczą wadę, a w zasadzie dwie – jest duże, i z powodu drugiej wady, to jest niskiej efektywności, niewiele można z tym zrobić. Od naprawdę długiego czasu nosiłem się z zamiarem zbudowania czegoś, co zajmie mniej miejsca na biurku, i w końcu przyszedł na to czas. W tej serii przedstawię moje zmagania z zaprojektowaniem i zbudowaniem relatywnie niewielkiego zasilacza biurkowego.
Założenia
Po wielu latach zajmowania się elektroniką i używaniem mojego dotychczasowego zasilacza, mogę z powodzeniem wymienić podstawowe założenia, jakie musi spełnić nowa konstrukcja:
- Regulowane napięcie wyjściowe w zakresie 0-25V.
- Wydajność prądowa conajmniej 2A.
- Wystarczająco szybkie(*) zabezpieczenie nadprądowe.
- Pomiar napięcia i prądu wyjściowego.
- Możliwość łatwego włączenia i wyłączenia wyjścia bez wyłączania zasilacza.
- Szybka i wygodna regulacja nastaw.
- Niewielki rozmiar i w miarę możliwości pasywne chłodzenie, brak radiatorów wystających poza obudowę.
(*) – Według mnie, wystarczająco szybkie zabezpieczenie nadprądowe to takie, które ochroni standardową diodę świecącą podłączaną do zasilacza ustawionego na maksymalne napięcie wyjściowe i z ograniczeniem prądu ustawionym na 20mA. Najlepiej przynajmniej kilkukrotnie.
Stabilizatory liniowe i impulsowe
Generalnie rzecz ujmując, zasilacze warsztatowe można podzielić na konstrukcje liniowe oraz impulsowe. Stabilizatory liniowe charakteryzują się zazwyczaj niskimi zakłóceniami na wyjściu oraz umożliwiają stosunkowo łatwą implementację szybko działającego zabezpieczenia nadprądowego. Mają natomiast niezaprzeczalną wadę – małą sprawność i idącą za tym sporą wagę i rozmiar (radiatory).
Stabilizatory impulsowe (szczególnie te o prostszej konstrukcji) generują znacznie więcej zakłóceń. O ile posiadają regulowane zabezpieczenie nadprądowe, to z reguły działa ono niewystarczająco szybko, żeby ochronić delikatniejsze komponenty. Zasilacze impulsowe wymagają dosyć znaczącej filtracji napięcia wyjściowego, i w konsekwencji mają duże pojemności na wyjściu. To również wpływa na działanie zabezpieczenia nadprądowego. Samo zabezpieczenie może działać idealnie szybko, ale na niewiele się ono zda, gdy samo rozładowanie kondensatora wyjściowego przez zasilany układ spowoduje jego uszkodzenie. Z drugiej strony zasilacze impulsowe mają niepodważalną zaletę – bardzo wysoką sprawność, czasem nawet ponad 90%.
Moc strat w zasilaczu liniowym
Jak już wspomniałem, poza wieloma zaletami, problemem zasilaczy liniowych jest duża moc strat. Wynika to z tego, że w zasilaczu liniowym natężenie prądu wejściowego jest równe natężeniu prądu wyjściowego (pomijam niewielki prąd potrzebny na pracę samego stabilizatora). Wynika z tego, że moc tracona na stabilizatorze wynosi z dobrym przybliżeniem:

Widać, że moc strat rośnie liniowo wraz ze wzrostem prądu wyjściowego oraz różnicy pomiędzy napięciem wejściowym (zasilania) a wyjściowym. O ile z prądem wyjściowym niewiele można zrobić, o tyle możemy przyjrzeć się napięciu wejściowemu. Załóżmy, że pobieramy z zasilacza 5V przy prądzie 2A (czyli moc 10W). Jeśli napięcie wejściowe wyniesie 30V, moc strat i sprawność to:

50 watów to nie byle co. Jeśli zasilacz miałby być chłodzony pasywnie, wymagałby całkiem sporego radiatora. A teraz zobaczmy, co się stanie, jeśli napięcie wejściowe wyniesie 10V:

Moc strat spadła pięciokrotnie, a tym samym sprawność wzrosła z niecałych 17% do 50%. Obiecujące. Zakładając, że standardowy stabilizator liniowy (nie typu low-dropout) potrzebuje napięcia wejściowego większego o około 3V od wyjściowego, moglibyśmy osiągnąć:

Jest to całkiem obiecujące. 6 watów zdecydowanie jest mocą, z którą można sobie poradzić chłodzeniem pasywnym.
Regulacja napięcia wejściowego
Podejście zakładające podniesienie sprawności regulowanego stabilizatora liniowego poprzez zmianę napięcia wejściowego tak naprawdę stosuje się od lat. W konstrukcjach zasilanych transformatorem sieciowym może to być wiele przełączanych odczepów, zależnie od ustawionego napięcia wyjściowego zasilacza. Jest to skuteczne rozwiązanie, ale dosyć duże i ciężkie. Ponieważ ważnym dla mnie warunkiem jest stosunkowo niewielki rozmiar zasilacza, postanowiłem postawić na hybrydę zasilacza impulsowego i liniowego. Zwiększy to co prawda szumy na wyjściu, jednak nie w stopniu znaczącym dla zasilacza warsztatowego do typowych zastosowań. Dodatkowo, co jest bardzo ważne, szumy te będą nieporównywalnie mniejsze niż w konstrukcji czysto impulsowej.
Zasilacz będzie się więc składał z zasilacza sieciowego, impulsowego regulatora wstępnego, oraz końcowego regulatora liniowego mogącego pracować w trybie stałego napięcia (CV) oraz stałego prądu (CC), czyli z zabezpieczeniem nadprądowym. Schemat blokowy wygląda tak:
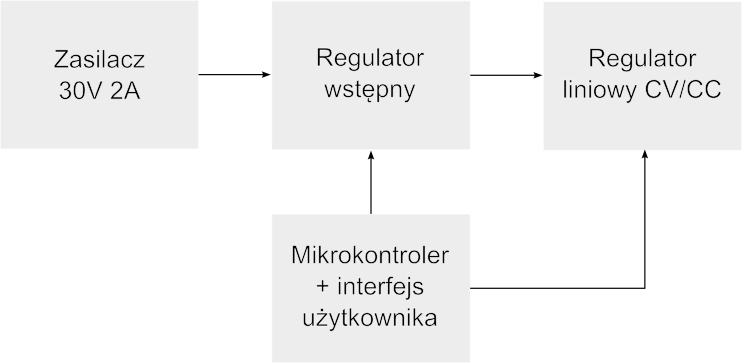
Interfejs użytkownika
Podczas wstępnego planowania urządzenia postanowiłem postawić na cyfrową regulację parametrów. I tak chciałem wykorzystać jakiś mikrokontroler i wyświetlacz do monitorowania parametrów zasilacza, postanowiłem więc użyć go również do zadawania nastaw. Powinno ułatwić to również sterowanie regulatorem wstępnym. Oczywiście, można zbudować regulator śledzący, który zawsze utrzymywałby napięcie wyższe od wyjściowego o zadaną wartość, jednak stwierdziłem, że skoro jest już mikrokontroler, to czemu nie ułatwić sobie zadania?
Podsumowanie
W tej części serii postawiliśmy podstawowe założenia nowej konstrukcji oraz ustaliliśmy ogólny sposób działania projektowanego zasilacza. W kolejnych dwóch lub trzech częściach przedstawię kolejno część analogową, część cyfrową oraz pomiary gotowej konstrukcji. Do zobaczenia!